主管:中国科学院
主办:中国优选法统筹法与经济数学研究会
中国科学院科技战略咨询研究院
主办:中国优选法统筹法与经济数学研究会
中国科学院科技战略咨询研究院
Chinese Journal of Management Science ›› 2025, Vol. 33 ›› Issue (3): 264-276.doi: 10.16381/j.cnki.issn1003-207x.2023.0429
Previous Articles Next Articles
Kunpeng Li( ), Xuefang Han
), Xuefang Han
Received:2023-03-15
Revised:2023-05-16
Online:2025-03-25
Published:2025-04-07
CLC Number:
Kunpeng Li, Xuefang Han. Research on Online Task Assignment and Global Path Planning Problem of Multi-AGV in Intelligent Warehouses[J]. Chinese Journal of Management Science, 2025, 33(3): 264-276.

"
"
| 参数符号 | 定义 |
|---|---|
| 栅格集合, | |
| 辅助0-1参数,若栅格i是货架栅格则为1,否则为0( | |
| 辅助0-1参数,若栅格i与栅格j连通则为1,否则为0( | |
| 表示栅格i的坐标,其中, | |
| 任务集合, | |
| 任务 | |
| 任务 | |
| 路网中的AGV集合, | |
| 分别表示调度前AGV k当前位置对应的栅格序号,和对应的停靠区栅格序号 | |
| AGV单次转向惩罚 | |
| AGV单位栅格通行时间 | |
| AGV | |
| T | 调度周期 |
| B | 足够大的正整数,用于公式线性化 |
| 决策变量 | |
| 0-1变量,当任务m分配给AGV | |
| 整数变量,表示任务m的延误时间 | |
| 整数变量,表示完成任务m的时间 | |
| 0-1变量,开始执行任务前,AGV | |
| 0-1变量,执行任务过程中,AGV | |
| 0-1变量,完成任务后,当AGV | |
| 0-1变量,当AGV |

"


"

"
路网 规模 | AGV数量 | 订单量/AGV数量 | 每种规模算例数目 |
|---|---|---|---|
| 5×5 | {3,4,5} | 0.8,1 | 1 |
| 8×8 | {4,6,8} | ||
| 10×10 | {3,5,7,10} | 0.8,1,1.2 | 3 |
20×20 40×40 60×60 | 单列栅格数× {1,1.2,1.5,2} |
"
| 算例 | CPLEX | Branch-and-cut | MA-TAPPCOA | Δ1(%) | Δ2(%) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| LB1 | Time1 | LB1-1800秒 | LB1-5400秒 | LB2 | Time2 | LB2-1800秒 | LB2-5400秒 | Obj | Time3 | ||||||
| 5-3-2 | 22.00 | 258 | 22.00 | 22.00 | 22.00 | 83 | 22.00 | 22.00 | 22.00 | 0.002 | 0.00 | 0.00 | |||
| 5-3-3 | 18.31 | 3600 | 18.28 | 20.45 | 34.00 | 3600 | 34.00 | 34.00 | 34.00 | 0.002 | 85.69 | 0.00 | |||
| 5-4-3 | 20.47 | 3600 | 18.44 | 24.56 | 34.00 | 3600 | 34.00 | 34.00 | 34.00 | 0.002 | 66.10 | 0.00 | |||
| 5-4-4 | 26.44 | 3600 | 26.44 | 26.56 | 39.00 | 3600 | 39.00 | 39.00 | 41.00 | 0.002 | 47.50 | 5.13 | |||
| 5-5-4 | 31.38 | 3600 | 30.79 | 31.97 | 33.82 | 3600 | 32.23 | 33.82 | 38.00 | 0.014 | 7.78 | 12.36 | |||
| 5-5-5 | 31.96 | 3600 | 31.81 | 35.36 | 44.00 | 3600 | 44.00 | 44.00 | 47.00 | 0.069 | 37.67 | 6.82 | |||
| 8-4-3 | 35.22 | 3600 | 34.91 | 35.22 | 52.25 | 3600 | 52.25 | 52.25 | 59.00 | 0.003 | 48.36 | 12.91 | |||
| 8-4-4 | 30.73 | 3600 | 28.05 | 31.26 | 63.00 | 3600 | 63.00 | 63.00 | 65.00 | 0.002 | 105.01 | 3.17 | |||
| 8-6-5 | 40.26 | 3600 | 39.89 | 40.33 | 81.00 | 3600 | 81.00 | 81.00 | 96.00 | 0.04 | 101.19 | 18.52 | |||
| 8-6-6 | 50.07 | 3600 | 49.80 | 50.38 | 94.00 | 3600 | 94.00 | 94.00 | 98.00 | 0.007 | 87.74 | 4.26 | |||
| 8-8-6 | 56.32 | 3600 | 56.13 | 56.42 | 89.71 | 3600 | 89.71 | 89.71 | 102.00 | 0.047 | 59.29 | 13.69 | |||
| 8-8-8 | 76.03 | 3600 | 72.50 | 76.57 | 131.00 | 3600 | 131.00 | 131.00 | 144.00 | 0.029 | 72.30 | 9.92 | |||
| Ave. | — | — | — | — | — | — | — | — | — | — | 59.89 | 7.23 | |||
"
| 算例 | 1 | 2 | 3 | 4 | 算例 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|---|---|---|---|
| 10-3-2 | 53.67 | 53.67 | 53.67 | 53.67 | 40-40-32 | 2836.00 | 2821.67 | 2815.00 | 2879.67 |
| 10-3-3 | 69.67 | 67.67 | 69.67 | 69.67 | 40-40-40 | 3333.67 | 3392.00 | 3393.67 | 3375.67 |
| 10-3-4 | 96.67 | 163.67 | 210.00 | 127.67 | 40-40-48 | 3608.00 | 4359.33 | 4495.67 | 4088.67 |
| 10-5-4 | 97.33 | 99.67 | 96.00 | 97.33 | 40-48-38 | 3565.33 | 3496.00 | 3547.33 | 3564.67 |
| 10-5-5 | 118.00 | 118.00 | 112.67 | 116.67 | 40-48-48 | 4120.00 | 4135.33 | 4198.67 | 4217.00 |
| 10-5-6 | 143.67 | 295.00 | 256.00 | 219.33 | 40-48-57 | 4571.00 | 5245.67 | 5392.67 | 4844.00 |
| 10-7-5 | 134.67 | 135.67 | 132.67 | 134.33 | 40-60-48 | 4465.33 | 4412.00 | 4356.00 | 4430.00 |
| 10-7-7 | 166.33 | 172.00 | 162.00 | 164.67 | 40-60-60 | 5171.33 | 5143.33 | 5143.67 | 5189.00 |
| 10-7-8 | 198.67 | 322.33 | 285.33 | 227.33 | 40-60-72 | 5331.33 | 6804.33 | 7133.67 | 6086.33 |
| 10-8-6 | 141.33 | 137.33 | 137.00 | 142.67 | 40-80-64 | 5936.67 | 6030.00 | 5918.33 | 5945.67 |
| 10-8-8 | 177.67 | 177.33 | 180.67 | 178.33 | 40-80-80 | 6917.33 | 7179.33 | 6910.00 | 6992.00 |
| 10-8-9 | 180.00 | 338.67 | 253.00 | 248.67 | 40-80-96 | 7818.67 | 9110.67 | 9716.67 | 9293.67 |
| Ave. | 131.47 | 173.42 | 162.39 | 148.36 | Ave. | 4806.22 | 5177.47 | 5251.78 | 5075.53 |
| 20-20-16 | 690.00 | 719.33 | 701.00 | 679.33 | 60-60-48 | 6160.33 | 6071.00 | 6023.33 | 6084.00 |
| 20-20-20 | 831.33 | 875.00 | 863.00 | 853.00 | 60-60-60 | 7236.00 | 7156.33 | 7509.00 | 7384.67 |
| 20-20-24 | 951.67 | 1203.67 | 1637.33 | 1267.33 | 60-60-72 | 7770.67 | 9021.33 | 9541.33 | 8638.00 |
| 20-24-19 | 904.00 | 937.67 | 857.33 | 894.67 | 60-72-57 | 7323.33 | 7269.67 | 7441.67 | 7336.00 |
| 20-24-24 | 1008.67 | 1062.67 | 1019.33 | 1015.67 | 60-72-72 | 8615.67 | 8681.00 | 9112.67 | 8744.67 |
| 20-24-28 | 1163.00 | 1558.00 | 1664.33 | 1422.67 | 60-72-86 | 9497.33 | 10634.67 | 11838.67 | 10859.33 |
| 20-30-24 | 1069.67 | 1083.67 | 1116.33 | 1100.00 | 60-90-72 | 9765.33 | 9644.00 | 9780.67 | 9784.33 |
| 20-30-30 | 1267.33 | 1298.00 | 1350.67 | 1304.67 | 60-90-90 | 10752.33 | 11005.33 | 11755.67 | 11068.00 |
| 20-30-36 | 1541.00 | 1916.00 | 2161.00 | 1837.00 | 60-90-108 | 11957.00 | 12990.00 | 14865.33 | 14170.33 |
| 20-40-32 | 1587.67 | 1506.33 | 1520.67 | 1509.00 | 60-120-96 | 12728.00 | 12604.67 | 13000.00 | 12921.00 |
| 20-40-40 | 1847.67 | 1713.67 | 1789.67 | 1962.00 | 60-120-120 | 14311.33 | 14759.33 | 15368.00 | 15132.00 |
| 20-40-48 | 2184.67 | 2697.00 | 3372.33 | 2679.33 | 60-120-144 | 16120.00 | 17628.67 | 20043.67 | 17832.33 |
| Ave. | 1253.89 | 1380.92 | 1504.42 | 1377.06 | Ave. | 10186.44 | 10622.17 | 11356.67 | 10829.56 |
"
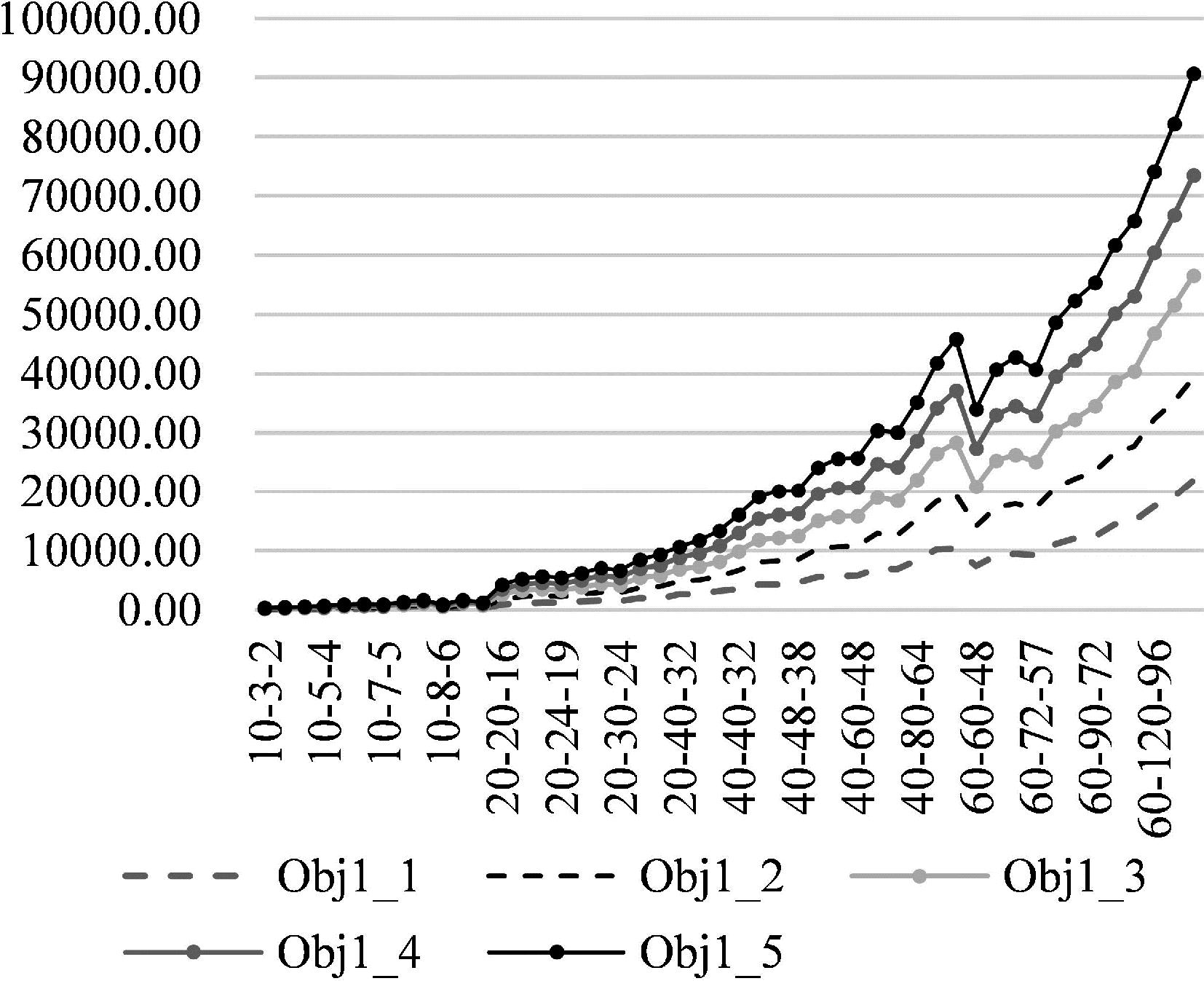
| 算例 | Obj1_1 | Obj1_2 | Obj1_3 | Obj1_4 | Obj1_5 | Time1_1 | Time1_2 | Time1_3 | Time1_4 | Time1_5 |
|---|---|---|---|---|---|---|---|---|---|---|
| 10-3-2 | 67.00 | 67.67 | 67.67 | 66.67 | 66.67 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 10-3-3 | 88.67 | 87.00 | 87.00 | 87.00 | 87.00 | 0.00 | 0.01 | 0.00 | 0.02 | 0.00 |
| 10-3-4 | 126.00 | 118.67 | 118.67 | 116.00 | 118.67 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 10-5-4 | 126.33 | 119.33 | 119.33 | 122.00 | 122.67 | 0.01 | 0.02 | 0.01 | 0.01 | 0.00 |
| 10-5-5 | 153.00 | 285.00 | 149.67 | 151.00 | 152.00 | 0.01 | 0.00 | 0.02 | 0.01 | 0.00 |
| 10-5-6 | 181.67 | 177.00 | 269.33 | 176.33 | 176.67 | 0.00 | 0.00 | 0.00 | 0.00 | 0.01 |
| 10-7-5 | 165.00 | 172.33 | 172.33 | 173.67 | 168.33 | 0.01 | 0.01 | 0.02 | 0.01 | 0.00 |
| 10-7-7 | 403.67 | 215.33 | 215.33 | 212.33 | 210.33 | 0.01 | 0.01 | 0.01 | 0.01 | 0.00 |
| 10-7-8 | 631.67 | 252.67 | 252.67 | 242.33 | 243.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 10-8-6 | 184.67 | 183.33 | 183.33 | 184.33 | 184.00 | 0.04 | 0.01 | 0.01 | 0.01 | 0.00 |
| 10-8-8 | 425.33 | 383.67 | 383.67 | 256.00 | 233.33 | 0.01 | 0.01 | 0.01 | 0.01 | 0.00 |
| 10-8-9 | 251.33 | 239.33 | 237.33 | 230.67 | 225.67 | 0.00 | 0.00 | 0.00 | 0.00 | 0.02 |
| 20-20-16 | 897.67 | 859.00 | 853.67 | 819.33 | 814.33 | 0.02 | 0.06 | 0.02 | 0.02 | 0.03 |
| 20-20-20 | 1134.67 | 1055.33 | 1033.00 | 1007.33 | 990.00 | 0.03 | 0.04 | 0.02 | 0.03 | 0.03 |
| 20-20-24 | 1236.00 | 1127.67 | 1125.67 | 1106.33 | 1101.00 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
| 20-24-19 | 1147.67 | 1075.00 | 1088.33 | 1078.33 | 1047.33 | 0.02 | 0.03 | 0.03 | 0.03 | 0.04 |
| 20-24-24 | 1382.00 | 1228.33 | 1228.67 | 1199.67 | 1185.67 | 0.04 | 0.03 | 0.03 | 0.03 | 0.04 |
| 20-24-28 | 1561.33 | 1419.33 | 1397.00 | 1370.67 | 1343.00 | 0.02 | 0.02 | 0.02 | 0.02 | 0.01 |
| 20-30-24 | 1456.00 | 1344.00 | 1342.33 | 1277.67 | 1252.33 | 0.03 | 0.03 | 0.03 | 0.03 | 0.04 |
| 20-30-30 | 1934.33 | 1779.33 | 1755.67 | 1516.00 | 1486.33 | 0.04 | 0.04 | 0.04 | 0.04 | 0.06 |
| 20-30-36 | 1892.67 | 1977.33 | 1896.33 | 1781.00 | 1769.33 | 0.03 | 0.02 | 0.03 | 0.02 | 0.26 |
| 20-40-32 | 2664.67 | 2104.00 | 2094.67 | 1910.67 | 1849.67 | 0.09 | 0.05 | 0.05 | 0.07 | 0.08 |
| 20-40-40 | 2631.00 | 2404.67 | 2273.33 | 2209.00 | 2218.33 | 0.08 | 0.06 | 0.06 | 0.08 | 0.11 |
| 20-40-48 | 3111.67 | 2540.67 | 2534.00 | 2700.33 | 2522.00 | 0.05 | 0.04 | 0.04 | 0.04 | 0.03 |
| 40-40-32 | 3463.67 | 3217.33 | 3204.67 | 3105.00 | 3094.33 | 0.08 | 0.07 | 0.09 | 0.08 | 0.12 |
| 40-40-40 | 4211.00 | 3793.00 | 3793.00 | 3657.33 | 3638.67 | 0.12 | 0.11 | 0.09 | 0.08 | 0.14 |
| 40-40-48 | 4268.00 | 3952.33 | 3979.00 | 3929.67 | 3919.33 | 0.07 | 0.07 | 0.07 | 0.07 | 0.20 |
| 40-48-38 | 4544.67 | 3953.67 | 3946.33 | 3868.33 | 3873.00 | 0.13 | 0.09 | 0.10 | 0.10 | 0.17 |
| 40-48-48 | 5573.67 | 4772.67 | 4779.00 | 4497.67 | 4493.00 | 0.29 | 0.11 | 0.11 | 0.11 | 0.21 |
| 40-48-57 | 5678.67 | 4992.67 | 5050.00 | 4964.33 | 4964.00 | 0.11 | 0.09 | 0.10 | 0.09 | 0.27 |
| 40-60-48 | 5712.33 | 5097.67 | 5096.33 | 4882.67 | 4910.33 | 0.25 | 0.15 | 0.15 | 0.15 | 0.27 |
| 40-60-60 | 6938.67 | 6029.33 | 6042.33 | 5710.67 | 5647.33 | 0.93 | 0.26 | 0.22 | 0.19 | 0.29 |
| 40-60-72 | 6818.00 | 5812.33 | 5819.00 | 5823.00 | 5825.67 | 0.24 | 0.12 | 0.13 | 0.12 | 0.16 |
| 40-80-64 | 8414.67 | 6882.00 | 6797.33 | 6603.67 | 6543.00 | 1.75 | 0.65 | 0.29 | 0.31 | 0.50 |
| 40-80-80 | 10171.33 | 8203.00 | 8173.67 | 7622.00 | 7682.33 | 3.21 | 0.91 | 0.33 | 0.32 | 0.53 |
| 40-80-96 | 10313.67 | 9094.00 | 8908.67 | 8822.33 | 8664.00 | 0.29 | 0.23 | 0.25 | 0.22 | 0.19 |
| 60-60-48 | 7371.67 | 6751.67 | 6750.00 | 6552.00 | 6558.67 | 0.68 | 0.30 | 0.19 | 0.19 | 0.32 |
| 60-60-60 | 9176.67 | 8072.33 | 8082.33 | 7719.00 | 7713.33 | 0.54 | 0.24 | 0.23 | 0.24 | 0.41 |
| 60-60-72 | 9491.33 | 8386.33 | 8411.00 | 8278.33 | 8260.67 | 0.23 | 0.19 | 0.19 | 0.18 | 0.22 |

"

"

"

"
"
| AGV数量/单列栅格数 | 单车总成本 | 单车等待成本 | 单车转向次数 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1.2 | 1.5 | 2 | 1 | 1.2 | 1.5 | 2 | 1 | 1.2 | 1.5 | 2 | ||||
| 20×20 | 40.57 | 43.64 | 41.89 | 46.59 | 0.35 | 0.46 | 0.40 | 0.66 | 6.07 | 5.97 | 6.23 | 6.90 | |||
| 40×40 | 77.27 | 80.76 | 81.21 | 81.25 | 0.33 | 0.35 | 0.49 | 0.72 | 6.37 | 6.48 | 6.79 | 7.04 | |||
| 60×60 | 109.36 | 108.33 | 115.28 | 113.41 | 0.26 | 0.29 | 0.50 | 0.59 | 6.68 | 6.62 | 6.78 | 7.34 | |||
| 1 | Yan R D, Jackson L, Dunnett S. A study for further exploring the advantages of using multi-load automated guided vehicles[J]. Journal of Manufacturing Systems, 2020, 57: 19-30. |
| 2 | Jia X, Meng M Q-H. A survey and analysis of task allocation algorithms in multi-robot systems[C]// Proceedings of 2013 IEEE international conference on robotics and biomimetics (ROBIO), Shenzhen, China,December 12-14, IEEE, 2013: 2280-2285. |
| 3 | Xu W X, Guo S S, Li X X, et al. A dynamic scheduling method for logistics tasks oriented to intelligent manufacturing workshop[J]. Mathematical Problems in Engineering, 2019, 2019(1): 1-18. |
| 4 | Polten L, Emde S. Scheduling automated guided vehicles in very narrow aisle warehouses[J]. Omega, 2021, 99: 1-20. |
| 5 | Chawla V K, Chanda A K, Angra S, et al. Simultaneous dispatching and scheduling of multi-load AGVs in FMS-A simulation study[J]. Materials Today: Proceedings, 2018, 5(11): 25358-25367. |
| 6 | Heger J, Voss T. Reducing mean tardiness in a flexible job shop containing AGVs with optimized combinations of sequencing and routing rules[J]. Procedia CIRP, 2019,81:1136-1141. |
| 7 | Singh N, Dang Q V, Akcay A, et al. A matheuristic for AGV scheduling with battery constraints[J]. European Journal of Operational Research, 2022, 298(3): 855-873. |
| 8 | Fransen K J C, Eekelen J A W M V, Pogromsky A, et al. A dynamic path planning approach for dense, large, grid-based automated guided vehicle systems[J]. Computers & Operations Research, 2020, 123: 1-10. |
| 9 | 张丹露, 孙小勇, 傅顺, 等. 智能仓库中的多机器人协同路径规划方法[J]. 计算机集成制造系统, 2018, 24(2):410-418. |
| Zhang D L, Sun X Y, Fu S, et al. Cooperative path planning in multi-robots for intelligent warehouse[J]. Computer Integrated Manufacturing Systems, 2018, 24(2):410-418. | |
| 10 | 张新艳, 邹亚圣. 基于改进A*算法的自动导引车无碰撞路径规划[J]. 系统工程理论与实践, 2021, 41(1): 240-246. |
| Zhang X Y, Zou Y S. Collision-free path planning for automated guided vehicles based on improved A* algorithm[J]. Systems Engineering-Theory & Practice, 2021, 41(1): 240-246. | |
| 11 | 李昆鹏, 刘腾博, 阮炎秋. 半导体生产车间智能AGV路径规划与调度[J]. 计算机集成制造系统, 2022, 28(9): 2970-2980. |
| Li K P, Liu T B, Run Y Q. Intelligent AGV routing scheduling with applications in semi-conductor production[J]. Computer Integrated Manufacturing Systems, 2022, 28(9): 2970-2980. | |
| 12 | 李昆鹏, 刘腾博, 贺冰倩, 等. “货到人”拣选系统中AGV路径规划与调度研究[J]. 中国管理科学, 2022, 30(4): 240-251. |
| Li K P, Liu T B, He B Q, et al. A study on routing and scheduling of automated guided vehicle in “Cargo-to-Picker” system[J]. Chinese Journal of Management Science, 2022, 30(4): 240-251. | |
| 13 | Wang Z H, Zeng Q C. A branch-and-bound approach for AGV dispatching and routing problems in automated container terminals[J]. Computers & Industrial Engineering, 2022, 166: 1-25. |
| 14 | 余娜娜, 李铁克, 王柏琳. 自动化分拣仓库中多自动导引小车在线协同调度算法[J]. 计算机集成制造系统, 2022, 28(11): 3340-3353. |
| Yu N N, Li T K, Wang B L. Multi-AGV online collaborative scheduling algorithm in automated sorting warehouse[J]. Computer Integrated Manufacturing Systems, 2022, 28(11): 3340-3353. | |
| 15 | 王江华, 楼佩煌, 钱晓明. 基于改进遗传算法的AGVS单双向混合路径规划[J]. 机械设计与制造工程, 2015, 44(6): 20-26. |
| Wang J H, Lou P H, Qian X M. Configuring mixed uni/bidirectional guide-path network for automated guided vehicle system based on improved genetic algorithm[J]. Machine Design and Manufacturing Engineering, 2015, 44(6): 20-26. | |
| 16 | Kim C W, Tanchocoj J M A. Operational control of a bidirectional automated guided vehicle system[J]. International Journal of Production Research, 1993, 31(9): 2123-2138. |
| 17 | Lam E, Bodic P L, Harabor D, et al. Branch-and-cut-and-price for multi-agent path finding[J]. Computers & Operations Research, 2022, 144: 1-13. |
| [1] | Kunpeng Li, Xuefang Han. Research on Autonomous Driving Control Mechanism and Vehicle Scheduling in Smart City Based on Global Perspective [J]. Chinese Journal of Management Science, 2024, 32(12): 140-152. |
| [2] | Xiao-yan GU,Liang CHEN,Qian LIU,Meng-di MU,Deng-sheng WU. Research on Grazing Path Planning with Time Window under Grass Livestock Balance Constraints [J]. Chinese Journal of Management Science, 2023, 31(8): 184-192. |
| [3] | XU Yin-feng, ZHI Rong-teng, ZHENG Fei-feng, LIU Ming. Online Strategy and Competitive Analysis of Production Order Scheduling Problem with Rental Cost of Shared Machines [J]. Chinese Journal of Management Science, 2023, 31(4): 142-150. |
| [4] | LI Kun-peng, LIU Teng-bo, HE Bing-qian, XU Dong-yang. A Study on Routing and Scheduling of Automated Guided Vehicle in “Cargo-to-Picker” System [J]. Chinese Journal of Management Science, 2022, 30(4): 240-251. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||