主管:中国科学院
主办:中国优选法统筹法与经济数学研究会
中国科学院科技战略咨询研究院
主办:中国优选法统筹法与经济数学研究会
中国科学院科技战略咨询研究院
中国管理科学 ›› 2025, Vol. 33 ›› Issue (3): 264-276.doi: 10.16381/j.cnki.issn1003-207x.2023.0429cstr: 32146.14/j.cnki.issn1003-207x.2023.0429
李昆鹏( ), 韩雪芳
), 韩雪芳
Kunpeng Li(), Xuefang Han
摘要:
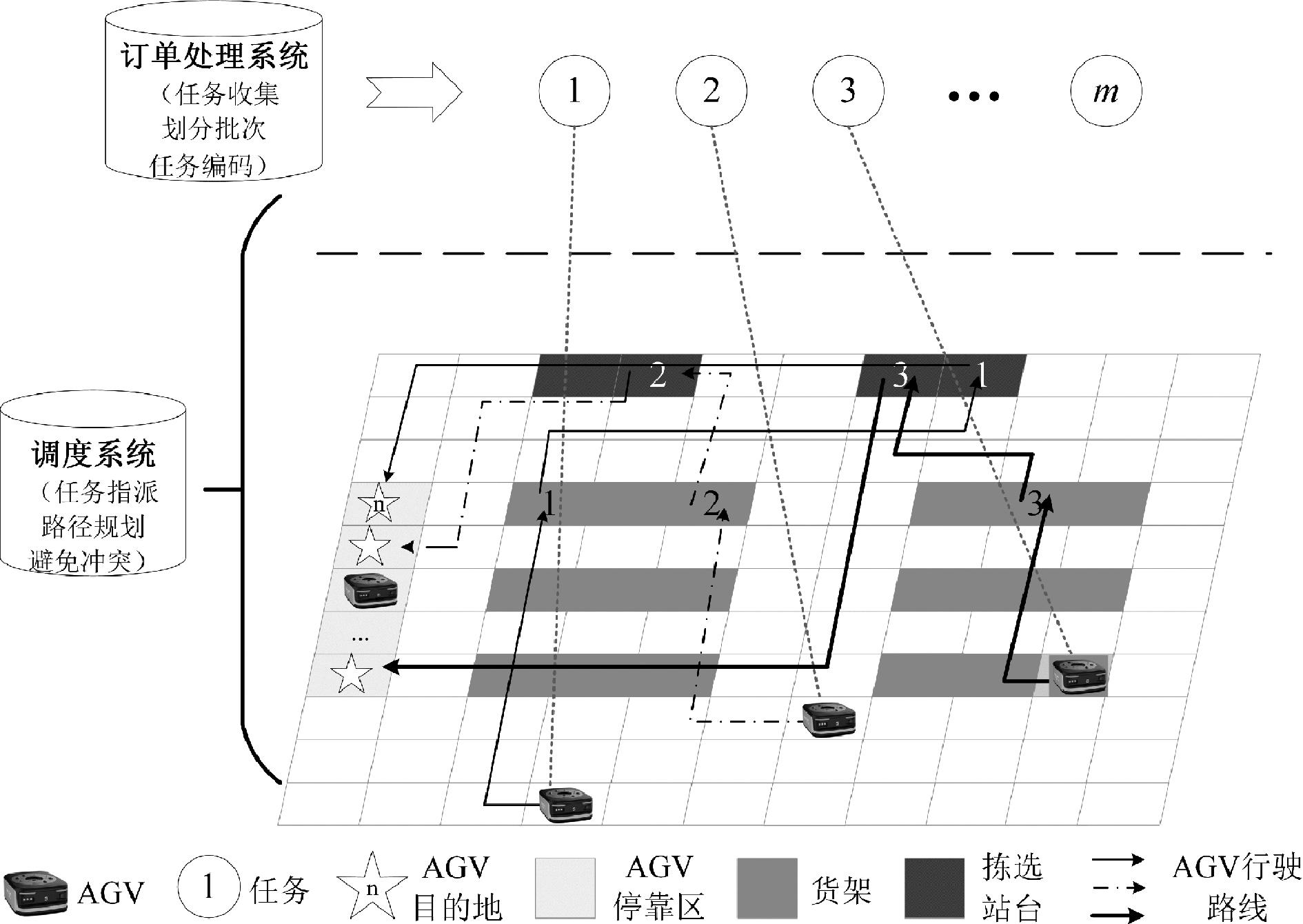
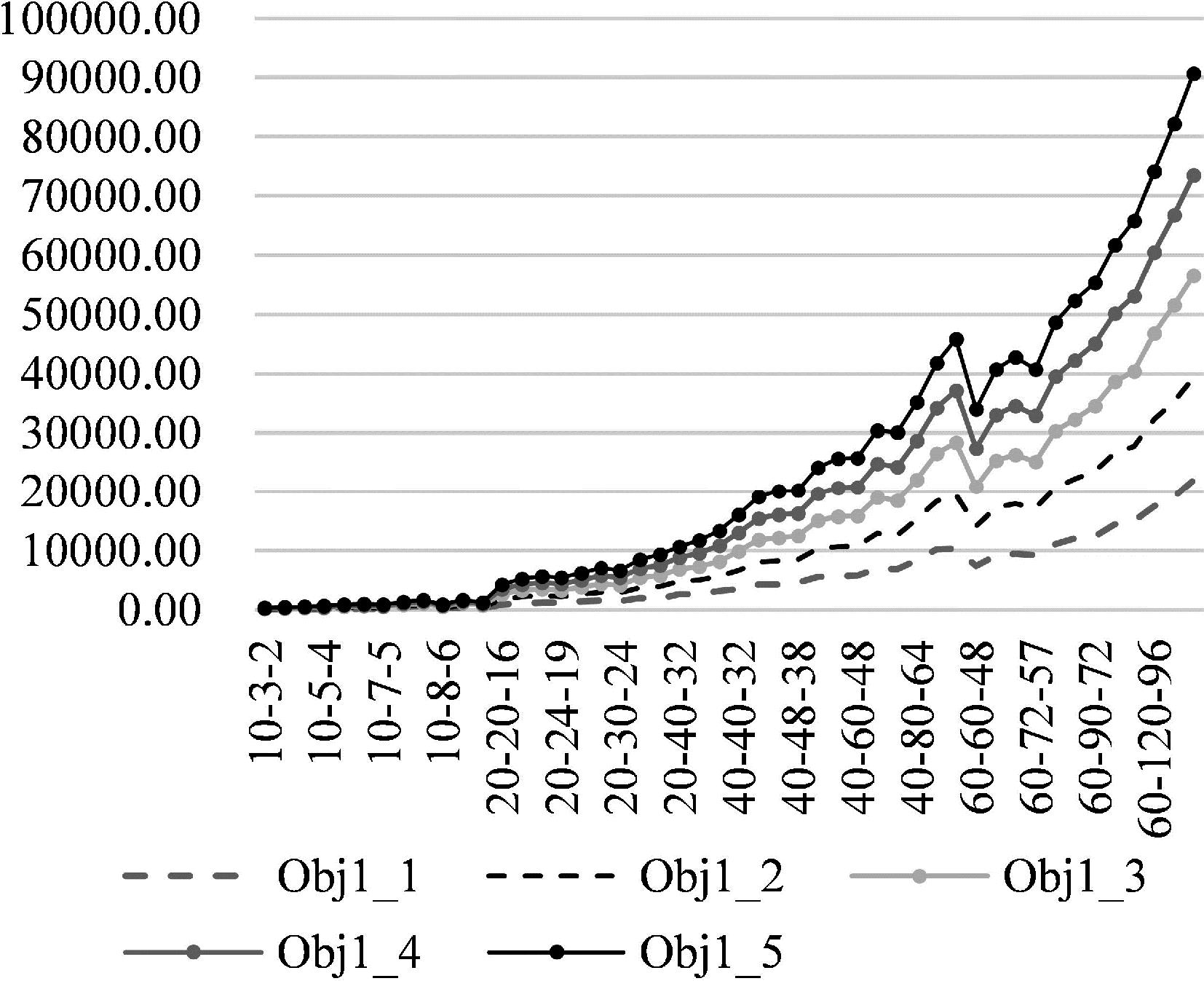
人工智能的快速发展加速了仓库的智慧化转型,越来越多的仓库引入大量AGV替代人工作业。智能仓库中多AGV在线全局调度问题成为当前的研究热点和难点。此问题包含任务指派和全局路径规划,需要考虑双向导引道路、无碰撞、AGV电量约束和任务时间窗等特性。针对该问题,本文以最小化AGV的运行时间和任务延迟惩罚之和为目标,建立混合整数线性规划模型。同时,设计一种多AGV任务指派与路径规划协同优化算法。首先,基于任务与AGV双重优先规则设计指派算法。其次,考虑多种碰撞情况,引入五种策略改进A*算法并设置重调度机制,全局规划AGV路径。为验证算法效果,引入分支切割算法求解小规模问题。12组小规模算例测试结果表明,本文提出的分支切割算法可将CPLEX下界平均提高59.89%,启发式算法求解结果与分支切割算法下界平均Gap值为7.23%。144组大规模算例测试结果表明,5种改进策略均能提升算法求解质量。改进算法可将传统算法的结果平均改善27.69%,且求解时间缩短至2秒内,效率提高130.01%。研究成果不仅适用于智能仓库的AGV调度决策,还能拓展至生产车间、自动化码头等路网相对规则、自动化程度较高的封闭场景中,为全局集中管控的多车调度问题提供参考。
中图分类号: