| [1] |
揭婉晨, 杨珺, 杨超. 多车型电动汽车车辆路径问题的分支定价算法研究[J]. 系统工程理论与实践, 2016, 36(7): 1795-1805.
|
|
Jie W C, Yang J, Yang C. Branch-and-price algorithm for heterogeneous electric vehicle routing problem[J]. Systems Engineering-Theory & Practice, 2016, 36(7): 1795-1805.
|
| [2] |
郭放, 杨珺, 杨超. 考虑充电策略与电池损耗的电动汽车路径优化问题研究[J]. 中国管理科学, 2018, 26(9): 106-118.
|
|
Guo F, Yang J, Yang C. Study on the electric vehicle routing problem in the present of charging strategy and battery consumption[J]. Chinese Journal of Management Science, 2018, 26(9): 106-118.
|
| [3] |
Conrad R G, Figliozzi M A. The recharing vehicle routing problem [C]//Proceedings of the 2011 Reno Industrial Engineering Research Conference,Reno,NV,USA,May 21-25, IISE, 2011:111-118.
|
| [4] |
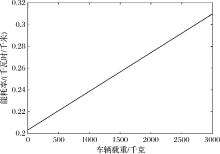
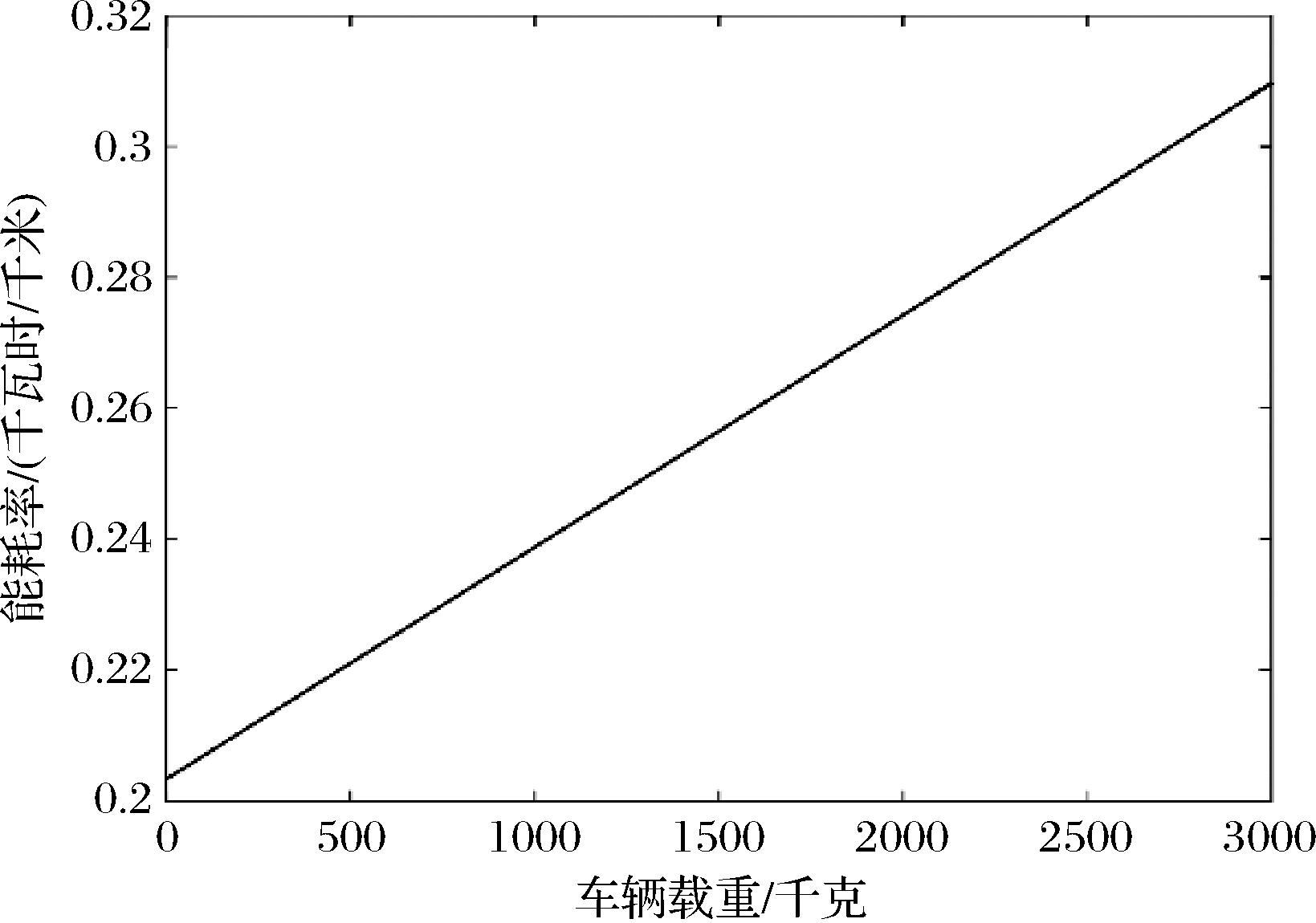
Kancharla S R, Ramadurai G. An adaptive large neighborhood search approach for electric vehicle routing with load-dependent energy consumption[J]. Transportation in Developing Economies, 2018, 4(2): 1-9.
|
| [5] |
黄建华, 刘方翔. 动态负载下电动汽车充电策略及路径优化问题[J]. 计算机集成制造系统, 2023, 29(11): 3909-3921.
|
|
Huang J H, Liu F X. Charging strategy and routing optimization of electric vehicles under dynamic load[J]. Computer Integrated Manufacturing Systems, 2023, 29(11): 3909-3921.
|
| [6] |
Bektaş T, Laporte G. The pollution-routing problem[J]. Transportation Research Part B: Methodological, 2011, 45(8): 1232-1250.
|
| [7] |
Xiao Y, Zhang Y, Kaku I, et al. Electric vehicle routing problem: A systematic review and a new comprehensive model with nonlinear energy recharging and consumption[J]. Renewable and Sustainable Energy Reviews, 2021, 151: 111567.
|
| [8] |
Desaulniers G, Errico F, Irnich S, et al. Exact algorithms for electric vehicle-routing problems with time windows[J]. Operations Research, 2016, 64(6): 1388-1405.
|
| [9] |
葛显龙, 李祖伟, 葛小波. 考虑灵活充电策略的带时间窗物流配送路径优化研究[J]. 控制理论与应用, 2020, 37(6): 1293-1301.
|
|
Ge X L, Li Z W, Ge X B. Research on logistics distribution route optimization with time window considering flexible charging strategy[J]. Control Theory & Applications, 2020, 37(6): 1293-1301.
|
| [10] |
Meng M, Ma Y. Route optimization of electric vehicle considering soft time windows and two ways of power replenishment[J]. Advances in Operations Research, 2020, 2020(1): 5612872.
|
| [11] |
Lu J, Chen Y, Hao J K, et al. The time-dependent electric vehicle routing problem: Model and solution[J]. Expert Systems with Applications, 2020, 161: 113593.
|
| [12] |
Zhang R, Guo J, Wang J. A time-dependent electric vehicle routing problem with congestion tolls[J]. IEEE Transactions on Engineering Management, 2022, 69(4): 861-873.
|
| [13] |
Wang L, Gao S, Wang K, et al. Time-dependent electric vehicle routing problem with time windows and path flexibility[J]. Journal of Advanced Transportation, 2020, 2020: 3030197.
|
| [14] |
Zulvia F E, Kuo R J, Nugroho D Y. A many-objective gradient evolution algorithm for solving a green vehicle routing problem with time windows and time dependency for perishable products[J]. Journal of Cleaner Production, 2020, 242: 118428.
|
| [15] |
Mirjalili S, Lewis A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67.
|
| [16] |
张金良, 李超. 碳排放影响下的动态配送车辆路径优化研究[J]. 中国管理科学, 2022, 30(9): 184-194.
|
|
Zhang J L, Li C. Research on dynamic distribution vehicle route optimization under the influence of carbon emission[J]. Chinese Journal of Management Science, 2022, 30(9): 184-194.
|
| [17] |
Keskin M, Çatay B. Partial recharge strategies for the electric vehicle routing problem with time windows[J]. Transportation Research Part C: Emerging Technologies, 2016, 65: 111-127.
|
| [18] |
Schneider M, Stenger A, Goeke D. The electric vehicle-routing problem with time windows and recharging stations[J]. Transportation Science, 2014, 48(4): 500-520.
|
| [19] |
Yu V F, Jodiawan P, Gunawan A. An Adaptive Large Neighborhood Search for the green mixed fleet vehicle routing problem with realistic energy consumption and partial recharges[J]. Applied Soft Computing, 2021, 105: 107251.
|
| [20] |
高佳静, 镇璐. 多卡车多机器人联合配送系统路径问题研究[J]. 中国管理科学, 2023, 31(3): 48-57.
|
|
Gao J J, Zhen L. Research on routing problem for joint delivery system based on multiple trucks and robots[J]. Chinese Journal of Management Science, 2023, 31(3): 48-57.
|
 ), Kaijun Zhou1,2, Yang Lv1
), Kaijun Zhou1,2, Yang Lv1